前向投影的数值计算
要求
-
编程实现扇形束或平行束CT前向投影数值计算(射线驱动、像素驱动、距离驱动,图像旋转+像素累加,或者其他投影方式),获取Shepp Logan仿体的前向投影, 显示对应的sinogram图,并将结果与上次作业中解析解获取的前向投影结果相对比,分析二者差异
-
修改数值计算仿体图像的大小(比如256*256,512×512,1024×1024等),分析不同情形下计算的投影计算的差异
思路
前向投影的实现方式有很多,例如上面提到的射线驱动、像素驱动、距离驱动、图像旋转累加等方式,其中图像旋转加累加的方式计算Sheep Logan仿体的前向投影最为简便。
除了使用图像旋转累加的方法计算sinogram图,本文还实现了射线驱动的方法计算前向投影。
图像旋转+像素累加
可以拆分成两个步骤:
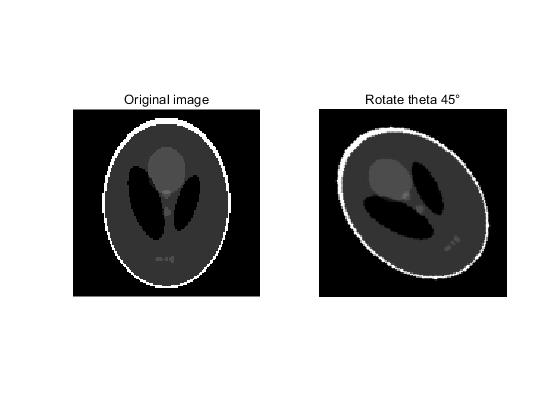
1. 使用双线性插值的方法旋转图像;
2. 沿探测器垂线方向累加像素值;
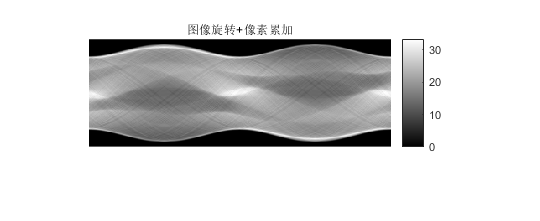
由sinogram图可以看到,先旋转图像再累加的方式能够较好的得到前向投影图
clc,clear
% 生成 Shepp Logan仿体图像
P = phantom(128); % 生成128*128像素值的图像
K = imrotate(P,45,'bilinear','crop');
figure
subplot(1,2,1)
imshow(P)
title('Original image')
subplot(1,2,2)
imshow(K)
title('Rotate theta 45°')
% 参数设定
NumDetector = 128; % 探测器数量
NumAngle = 360; % 旋转角度
Rdata = zeros(NumDetector,NumAngle);
for i=1:NumAngle
K = imrotate(P,i,'bilinear','crop');
Rdata(:,i) = sum(K,1);
end
figure
imshow(Rdata,[])
colorbar()
colormap(gray)
title("Shepp-Logan数值法投影图")
射线驱动
射线驱动方式可以分为以下几步:
- 旋转探测器并计算每个探测晶体中心的垂线
- 计算该垂线穿过图像中的像素,并累加像素值
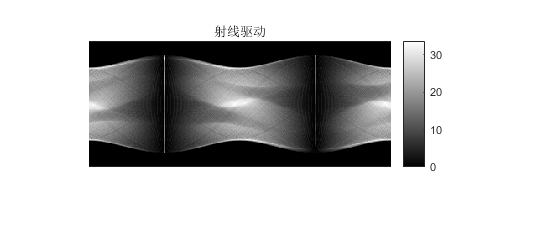
由投影结果可以看到,在某些特定角度如90°和270°,前向投影结果较差,原因是在这些位置k = 0,函数表达式y = b。
clc,clear
% 生成 Shepp Logan仿体图像
P = phantom(128);
figure
imshow(P)
title('Shepp-Logan')
% 参数设定
NumDetector = 150; % 探测器数量
NumAngle = 360; % 旋转角度
Rdata = zeros(NumDetector,NumAngle);
for i=1:NumAngle
for j =1:NumDetector
[k,b] = CalSlope(size(P),i,j,NumDetector);
Rdata(j,i) = CalDis(k,b,P);
end
end
figure
imshow(Rdata,[])
colorbar()
colormap(gray)
title("射线驱动")
function [k,b] = CalSlope(ImgSize, angle, num, NumDetector)
% 本函数用于计算探测器在特定偏转角度,穿过特定探测晶体中心的直线方程
% Imgsize 图像大小
% angle 偏转角度
% num 晶体排序
% NumberDetector 晶体总数
DisAbord = 100;
%角度弧度制转换
anglePi = pi*angle / 180;
%计算k
%k1 = tan(anglePi);
if angle == 0
k = 1;
elseif angle == 90
k = 0;
else
k = -1/tan(anglePi);
end
%计算最中心的传感器的坐标
center_x = ImgSize(2)/2+sin(anglePi)*DisAbord;
center_y = ImgSize(1)/2-cos(anglePi)*DisAbord;
%算出第num个传感器距离中心的距离
DisCenter = (num-(NumDetector+1)/2);
%计算第num个传感器的坐标
x = center_x + DisCenter*cos(anglePi);
y = center_y + DisCenter*sin(anglePi);
%根据y=kx+b计算b
b = y - k*x;
end
%% function
function value = CalDis(k,b,Img)
value = 0;
for i = 1:size(Img,2)
for j = 1:size(Img,1)
dis = abs(k*(i-0.5)-(j-0.5)+b)/sqrt(k^2+1);
if k == 0||k == 1
judge = 1/2;
else
judge = 1/2*abs(k/sqrt(k^2+1));
end
if dis < judge
value = value + Img(j,i);
end
end
end
end
结果
投影数值法与解析法比较

从图中可以看出解析法的结果更为平滑,过度较为自然。在数值法投影图中能够较为明显的看到投影图的缝隙,在细节上有所缺失。
不同图像尺寸的比较
在数值法求解投影图中,使用phantom(N)创建特定尺寸大小的灰度图
P = phantom(128); % 生成128*128像素值的图像


在图像中可以看出,256*256图像的sinogram图较128*128投影图有比较明显的改进,在细节上更加细腻,并且图像colorbar更长,所表达的灰度梯度更多。